

摘要:机器人驱动方式分为三种,包括电动驱动、液压驱动和气动驱动。电动驱动方式节能环保,控制精度高,但功率和速度相对较低;液压驱动方式功率大,适用于重型机器人,但存在泄露和效率问题;气动驱动方式响应快,维护简单,但精度相对较低。完善的机制评估对于选择适合的机器人驱动方式至关重要,需综合考虑应用场合、成本和性能要求。SE版33.20.55提供了对各种驱动方式的全面评估,有助于选择合适的机器人驱动方式。
本文目录导读:
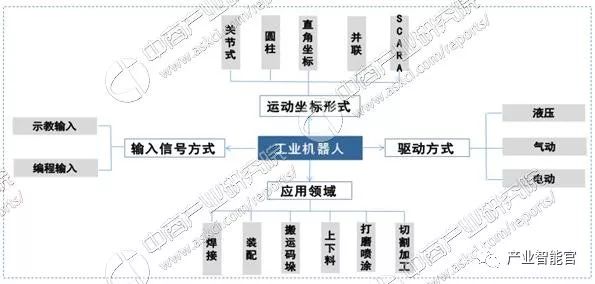
随着科技的飞速发展,机器人技术已成为当今工程领域的重要研究方向,驱动方式作为机器人的核心组成部分,对机器人的性能有着至关重要的影响,目前,机器人主要采用的驱动方式包括液压驱动、电动驱动和气动驱动三种,本文将对这三种驱动方式的优缺点进行详细的分析和比较。
液压驱动
1、优点
(1)动力强大:液压驱动系统能够提供较大的力矩,使得机器人在重载、高强度的工作环境下表现出色。
(2)响应速度快:液压系统的响应速度较高,能够满足机器人对快速运动的要求。
(3)易于实现精确控制:液压系统中的压力、流量等参数可以通过调节阀进行控制,从而实现机器人的精确运动控制。
2、缺点
(1)能耗较高:液压系统需要较大的能量输入,因此能耗较高。
(2)维护成本高:液压系统对油液的要求较高,需要定期更换油液,维护成本较高。
(3)对环境要求高:液压系统容易受到温度和压力的影响,需要在较好的环境下运行。
电动驱动
1、优点
(1)节能环保:电动驱动系统采用电能作为动力源,具有节能环保的优点。
(2)控制精度高:电动驱动系统通过电机控制器实现精确控制,具有较高的控制精度。
(3)维护成本较低:电动驱动系统的结构简单,维护成本较低。
2、缺点

(1)动力较弱:电动驱动系统提供的动力相对较小,适用于轻载或中等负载的机器人。
(2)受电池性能限制:电动驱动系统受电池性能的影响较大,电池的性能直接影响机器人的运行性能。
气动驱动
1、优点
(1)结构简单:气动驱动系统结构简单,便于实现机器人的快速搭建和调整。
(2)响应速度快:气动系统的响应速度较快,适用于需要快速运动的机器人。
(3)维护成本低:气动系统的工作介质为空气,无需定期更换,维护成本较低。

2、缺点
(1)动力有限:气动驱动系统提供的动力有限,适用于轻载或中等负载的机器人,在重载环境下,需要增加气压或配置多个气缸以满足需求。
(2)精度控制较难:气动系统的精度控制相对较难,受到气压波动和环境温度等因素的影响较大。
液压驱动、电动驱动和气动驱动三种方式各有优缺点,液压驱动具有强大的动力和快速的响应速度,但能耗较高、维护成本大;电动驱动节能环保、控制精度高,但动力较弱、受电池性能限制;气动驱动结构简单、响应速度快、维护成本低,但动力有限、精度控制较难,在选择机器人的驱动方式时,需要根据具体的应用场景和需求进行综合考虑,在重载、高强度的工作环境下,液压驱动更为合适;而在轻载、对精度要求较高的场景下,电动驱动或气动驱动可能更为适合,随着科技的进步,机器人驱动方式可能会朝着更高效、更智能、更环保的方向发展。
展望
随着科技的不断发展,机器人技术将越来越广泛地应用于各个领域,机器人驱动方式可能会有以下发展趋势:(1)混合驱动:将液压、电动和气动等多种驱动方式相结合,以实现机器人的高效、高精度运动。(2)智能驱动:通过引入人工智能和机器学习等技术,实现机器人的自适应运动控制和智能决策。(3)新型驱动方式:研发新型驱动方式,如磁流体驱动等,以提高机器人的性能和使用范围。(4)绿色环保:在机器人驱动方式的设计中更加注重环保和节能,降低对环境的影响,随着技术的不断进步和应用领域的拓展,机器人驱动方式将朝着更高效、更智能、更环保的方向发展,七、参考文献[此处插入参考文献]八、附录[此处可附相关图表、数据等]通过本文对液压驱动、电动驱动和气动驱动的详细分析,我们对三种驱动方式的优缺点有了更深入的了解,在实际应用中,我们需要根据具体场景和需求选择合适的驱动方式,以实现机器人的高效、精确运动,随着科技的不断发展,我们也期待着更先进的机器人驱动方式的出现。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...